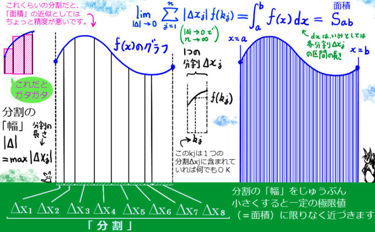
「微分操作の逆演算は積分操作」というのが微積分学の基本定理の内容です。表現の方法はいくつかありますが、てきとうな定数を c として$$\frac{d}{dx}\int_c^xf(t)dt=f(x)$$という表現をするのが、1つの形です。(※変数の表記方法に注意してください。関数としての変数は、あくまで x です。)「ある関数の積分を微分すると元の関数」という事実の表現という事です。$$\int_c^xf(t)dt$$ という表現は、「定積分で積分区間の片方の端の値を変数と考えた場合」の事を言っているのですが、 分かりにくい場合、$$S(x)=\int_c^xf(t)d$$ とおくと、少し見やすくなるかもしれません。 積分区間の片方の端の値 a は固定して、右側の値をずずずっと変化させると「面積」の値も変わります。変化させる「右側の端の値」を変数 x として、面積である定積分を関数 S(x) として考えているわけです。
このように\(\frac{d}{dx}G(x)=f(x)\)を満たす G(x) を f(x) の「原始関数」と言い、 \(S(x)=\int_c^xf(t)dt\)は、f(x)の「原始関数の『1つ』」です。 この時、任意の定数 C を用いて S(x) + C もf(x)の原始関数なのです。(※定数を微分しても0なので。) この任意の定数 C は「任意定数」「積分定数」などと呼ばれます。
定積分は原始関数で表せる
さて、この\(S(x)=\int_c^xf(t)dt\)に具体的な値 x = a, b を代入する事を考えます。 \(S(a)=\int_c^af(x)dx,\hspace{10pt}S(b)=\int_c^bf(x)dx\) であるわけですが、 (※積分区間に変数 x を含んでいないので dt ではなくdx 表記にしています。また、積分区間の端点が定数であれば、定積分は x の関数ではなく、あくまで何らかの「定数」になる事にも注意が必要です。)
積分区間の端点の変換:例えば x について [0, 1] で積分するなら、θ については\(\left[\frac{\pi}{2}, 0\right]\)で積分 ※一見積分する区間が変になるようですが、この区間での積分で正しい結果が出るのです。
部分積分は、原始関数が分かりにくい関数について適用します。 例えば、ln x の原始関数は、微分の公式集を見ると見当たりません。(※このページの前半の「積の微分公式」のところに記載があります。) そこで、ln x に「『1次の単項式 x の微分(=1)』が隠された形で掛けられている」・・と見て、部分積分を適用すると、うまく積分ができるのです。 $$\int \ln x dx= \int (x)^{\prime}\ln x dx=x\ln x – \int x(\ln x)^{\prime}dx=x\ln x – \int x\frac{1}{x}^{\prime}dx=x\ln x – \int 1 dx=x\ln x – x + C$$ また物理では、無限遠(じゅうぶん遠くと見なせる範囲)で関数がゼロになるときに、部分積分を利用した式変形を行う時があります。その場合は、原始関数を知りたいわけではなくて利用しやすいように式の形を変える事に利用しているわけです。
x, y, z の直交座標上で、
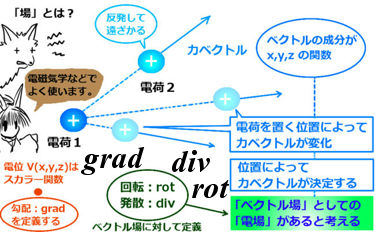
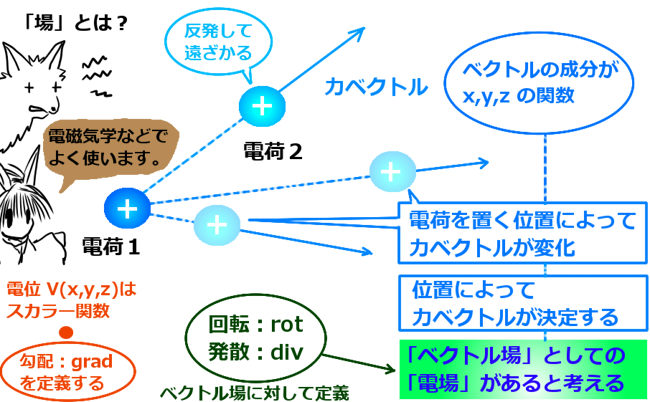
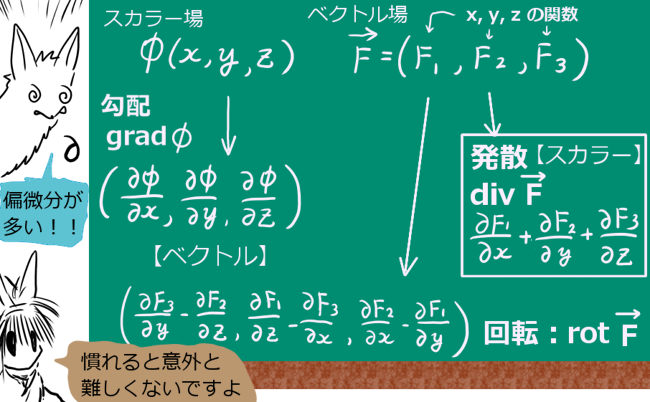
次のように各成分が x, y, z の関数として表される空間ベクトルを「ベクトル場」と呼びます:
$$\overrightarrow {F}(x,y,z)=(\hspace{3pt}F_1(x,y,z),F_2(x,y,z),F_3(x,y,z)\hspace{3pt})$$
$$ベクトルの各成分\hspace{3pt}F_1(x,y,z)などは、x,y,z の多変数関数(スカラー関数)$$
平面ベクトルで考えたとしても、成分が1つ減るだけで同様にベクトル場を考える事ができます。4成分以上の場合も理論的には考える事は可能ですが、普通はあまり考えません。ここでは基本的に3成分の空間ベクトルのベクトル場を考えます。
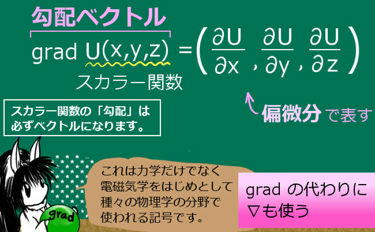
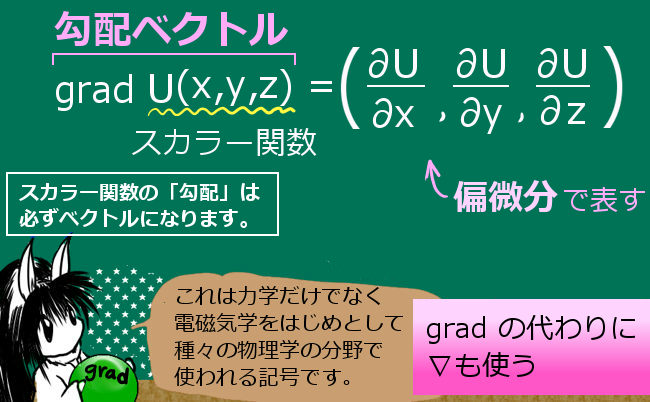
スカラー場とは、数式的には座標成分 x, y, z を変数とする多変数関数の事です。意味としては何ら難しくないのですが、電磁気学等の理論ではベクトル場と入り乱れる形で使われるので、物理の理論の中では慣れないと少し難しく感じると思います。
「スカラー場」の意味
x, y, z の直交座標上で、
次のように x, y, z の関数として表される多変数関数を「スカラー場」と呼びます:
$$\phi= \phi (x,y,z)$$
記号はここでは「\(\phi\)ファイ」を用いていますが、別に何でも構いません。
これは数学的に見れば通常の多変数関数であって、これをスカラー場と呼ぶのは基本的には x, y, z が空間上の直交座標の成分である事が明確であって物理等で用いられる場合、特にベクトル場と区別する場合です。
このようなベクトル場である電場に対して、ある位置での+1[C]の電荷が持つ事になる位置エネルギー(または「ポテンシャル」)を電位と言います。これは日常でもよく耳にすると思われる電圧と本質的には同じものです。電位は、ベクトルでは無く、スカラー場になります。つまり、x, y, z という3つの変数によって決まる1つの値が決まるという3変数関数になります。
$$= \left( \frac{\partial^2 F_3 }{\partial x \partial y }- \frac{\partial^2 F_3 }{\partial y \partial x } \right) + \left( \frac{\partial^2 F_1 }{\partial y \partial z }- \frac{\partial^2 F_1 }{\partial z \partial y } \right) + \left( \frac{\partial^2 F_2 }{\partial z \partial x }- \frac{\partial^2 F_2 }{\partial x \partial z } \right) =0 $$
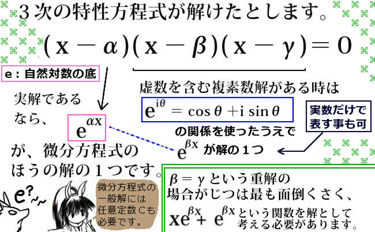
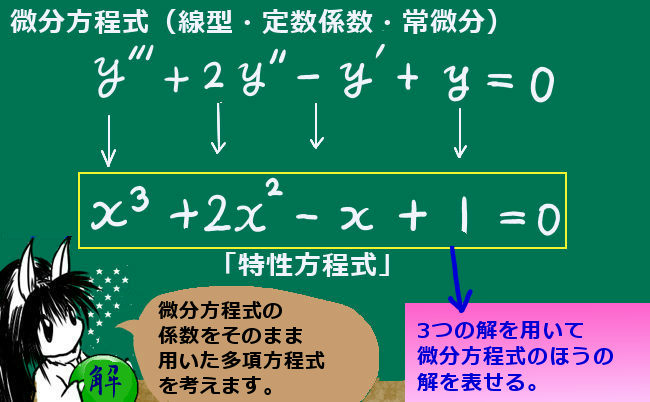
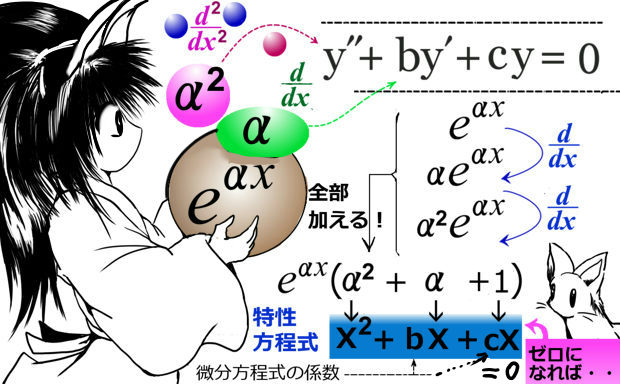
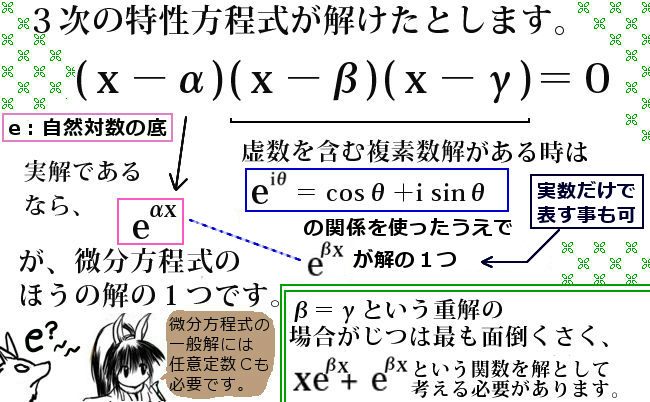
このように、作り方自体は簡単です。じつは特性方程式の「解」が、微分方程式のほうの解に直接関係します。根底にあるのは、自然対数の底 e の指数関数の微分演算です。微分して得る導関数が元の関数と同じであり、合成関数の微分を利用すると「元の関数×定数倍」という形を作れます。このパーツを上手に利用する事で、一般的には特性方程式とその解を計算すればよい、という理論になるのです。
用いる微積分の基本公式は、自然対数の底 e の指数関数と合成関数の微分公式です。それと積の微分公式も使用します。
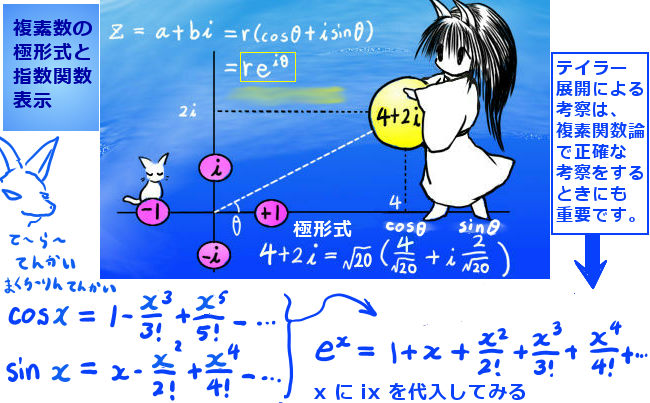
まず、解が複素数解(虚数単位 i を含む解)である場合を述べます。この場合のほうがじつは比較的簡単です。解の表現としては虚数単位 i を含む形と、含まない形の両方で表現可能です。任意定数として複素数も許容されるとする事によって、定数をてきとうに調整すれば両者は同等になります。2つの形を両方記しておきましょう。
形式的には、e の指数関数のマクローリン展開(x=0でのテイラー展開)に、xの代わりに「 ix を代入してみて」、そこに正弦と余弦のマクローリン展開を「代入」する事で複素数の「指数関数表示」を得ます。ただし、より正確には複素数変数の指数関数を新たに定義するか、正則関数としての指数関数の複素数領域への拡張はただ1通りしかないという論法で指数関数表示を考察します。
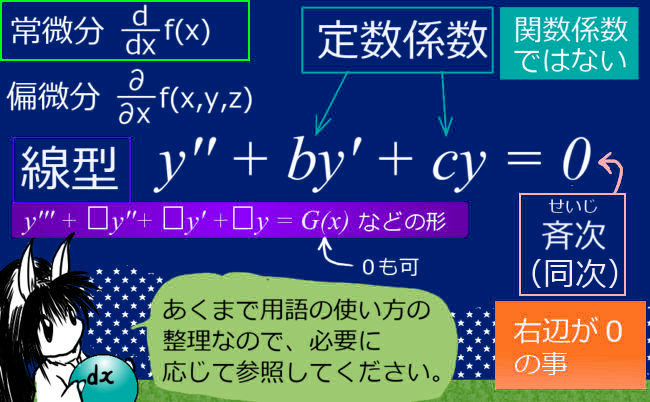
この事を踏まえて、微分方程式 y”+ay’+by = 0 の解を考察します。
ここで、特性方程式の複素数解について、極形式ではなくて A + Bi の形のほうを考える事がポイントです。その形を、指数関数に適用してみましょう。