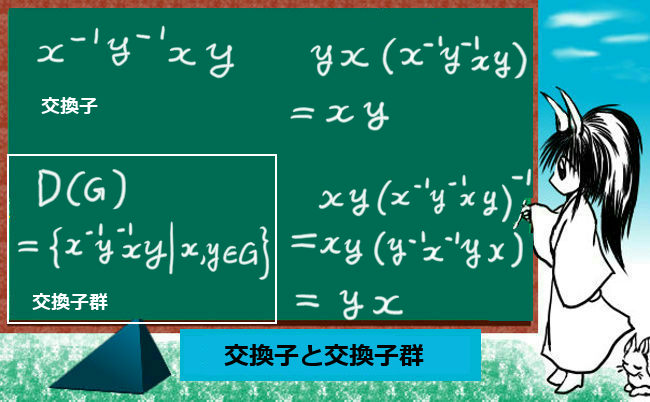
可解群(solvable group)とは、群に対して交換子群列を作った時に
Dk(G)={e}【単位元だけからなる群】となる自然数kが存在する群Gの事です。以下、D(G)(=D1(G))はGの交換子群で、D2(G)=D(D1(G))、D3(G)=D(D2(G))、・・・等とします。
◆可解群に関しては、次の定義をする事もあります:
群Gに対して有限個の正規部分群の列Hjがあり【jは自然数、H0=G】、次のようにGの正規部分群同士でもHjはHj-1の正規部分群になっているものとする。$$G=H_0\triangleright H_1 \triangleright H_2\triangleright H_3\triangleright \cdots\triangleright H_{n-1} \triangleright H_n=\{e\}$$さらに剰余群Hj-1/Hjは可換であるとする。このような時、Gを可解群と呼ぶ。
この定義は、実は交換子群を使った方の定義と同等のものです。以下の議論では交換子群を使ったほうの定義で話を進めていきます。
可解群の性質7つ
可解群のいくつかの重要な性質をまとめると次のようになります。
交換子群列を作った時に$$G\supset D_1(G)\supset D_2(G)\supset D_3(G)\supset \cdots\supset D_k(G)=\{e\}$$ となる自然数kが存在する時にGを可解群と言い、次の性質があります。
- 可換である群は全て可解群である。
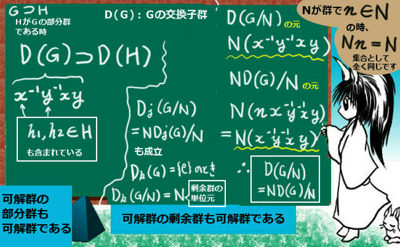
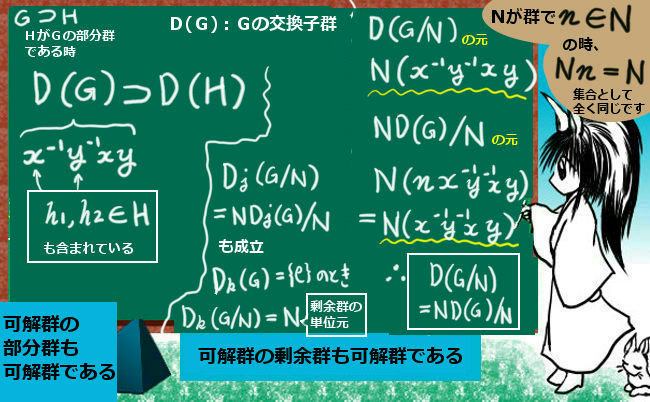
- 可解群の部分群も可解群である。
- 可解群の剰余群も可解群である。
- Gの正規部分群Nに対して、Nと剰余群G/Nが共に可解群ならばGも可解群となる。
- Gの正規部分群Nに対して、剰余群G/Nが可換群になる必要十分条件は、NがD(G)を含む事【N⊃D(G)】である。
- 可解群の交換子群列のうち、隣り合うもの同士の剰余群Dj-1(G)/Dj(G)
【D2(G)/D3(G)等】は可換群である。 - 可換群を交換子群列で定義したものとGの正規部分群の列で定義したものは、必要十分条件で結ばれるので互いに同等である。
言葉として「可換」と「可解」が似ていて紛らわしいので注意。
以下、証明をしていきます。
①可換である群は全て可解群
まず最初は簡単です。
{e}の交換子を作ってもeにしかならないので、交換子群列は一度{e}になるとその先の交換子群はずっと{e}です。可換群はそもそも任意の交換子が単位元eであるわけですから、「可換群は可解群である」と言えます。
②可解群の部分群も可解群
2番目については集合としての包含関係を丁寧に見て行きます。
交換子についてHがGの部分群であれば、Gの交換子群にはHの元で作った交換子も全て含まれるので、D(G)⊃D(H)です。【交換子群列の中ではこれはD1(G)およびD1(H)】
すると、今度はD(G)の交換子群とD(H)の交換子群についても同じ事が言えるわけですから、D2(G)⊃D2(H)です。
以下同様にして任意の自然数jについてDj(G)⊃Dj(H)です。
ここで、Gが可解群であればDk(G)={e}となるkが存在するので、
その番号において{e}⊃Dk(H)であり、
それを満たせるのは同じく単位元だけからなる群しかないのでDk(H)={e}であり、従ってHも可解群である事を意味します。
③可解群の剰余群も可解群
3番目は、剰余類と剰余群の性質を丁寧に扱う必要があります。
次にNをGの正規部分群として剰余群G/Nの交換子を考えます。
Gの元xとyを使って、交換子群D(G/N)の元は
(Nx)-1(Ny)-1(Nx)(Ny)=N(x-1y-1xy) と書けます。
【D(G/N)もまた剰余類を元とする群であり、N=Neを単位元とする。】
ここで2つの元の積を元とする別の群ND(G)={nb|n∈N,b∈D(G)}を考えると、
これはNを正規部分群に持つ群となりNによる剰余群を定義できます。
【※一般に、HがGの部分群で\(G\triangleright N\)である時、NはNHの部分群であり、任意のs∈NH(⊂G)に対してsN=Nsとなる(任意のt∈Gに対してそうだから)ので、NはNHの正規部分群。
このタイプの群に対する剰余群は、(NH)/Nの事をNH/Nのように書きます。】
剰余群ND(G)/Nの元はN(nb)=(Nn)bですが、
Nが群でn∈Nに対してNnは集合としてはNとして全く同じ物になるので、N(nb)=Nb=N(x-1y-1xy)
よって、全く同じ元を持つのでD(G/N)=ND(G)/N
他方、D(G/N)の元uとwを使うとD2(G/N)=N(u-1w-1uw) ですが、
剰余群ND2(G)/Nの元は先ほどと同じくn∈Nを考えると
N(nu-1w-1uw)=(Nn)(u-1w-1uw)=N(u-1w-1uw) となり、
D2(G/N)=ND2(G)/N という事にもなります。
全く同じ論法で、任意の自然数jに対してDj(G/N)=NDj(G)/N が成立します。
すると Dk(G)={e}となるkにおいて、
NDk(G)/N の元はN(ne)=Ne=N【剰余群の単位元】ただ1つという事になり、
Dk(G/N)=NDk(G)/N=N となってG/Nも可解群であるという結果になります。
④正規部分群Nと剰余群G/Nが共に可解群 ⇒ Gも可解群
次に4番目の性質ですが、これも1つ1つの式を丁寧に紐解きます。
G/NとNが共に可解群である場合には、
①:Dk1(G/N)=Ne=N かつ
②:Dk2(N)={e}
となる自然数k1とk2が存在します。
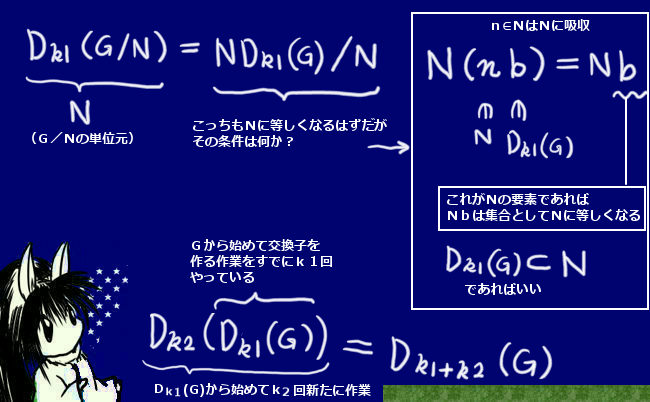
この時、前述において示した事からDk1(G/N)=NDk1(G)/N であるわけですが、
Dk1(G/N)=NですからN=NDk1(G)/Nという事になり、
実はDk1(G)⊂Nが成立しています。
【※n∈Nおよびb∈Dk1(G)として、NDk1(G)/Nの元N(nb)=Nb は集合としてNに等しくならないといけないので、bはNの元である必要があります。それがDk1(G)⊂Nの意味です。】
すると、Dk2(N)⊃Dk2(Dk1(G)) です。
ここで、Dk2(Dk1(G))とは
「すでにGから始めてk1回交換子を作る演算を行ってできた交換子群に対し、
そこを起点として改めてk2回交換子を作る演算を行ってできた交換子群」です。
従って、Gから始めて(k1+k2)回の交換子を作る演算を行ったDk1+k2(G)に等しいという事です。
よってDk2(N)⊃Dk2(Dk1(G))=Dk1+k2(G)であり、
Dk2(N)={e}でしたから、{e}⊃Dk1+k2(G) であり、
これを満たすにはDk1+k2(G)={e}しかあり得ず、それを満たす自然数k1+k2が存在する事になります。よって、おおもとの群Gも可解群である事になります。
この4番目の性質について、特に次のような特別な場合には1つの命題が成立します。
以下、Hjは群であるとします。
$$H_n\triangleright H_{n-1}\triangleright H_{n-2} \triangleright \cdots H_3\triangleright H_2\triangleright H_1\triangleright \{e\}$$
ここで、もし\(H_{j+1}\triangleright H_j\) が任意の自然数jについて成立し、剰余群Hj+1/Hjが可解群であり、
またH1も可解群であったとしましょう。
そのような特別な場合が発生する時、H1が可解群であり、H2/H1も可解群ですからH2も可解群です。
そしてH3/H2も可解群なので、H3も可解群です。
同様にして、任意の自然数jについてHjは可解群という事になります。
より具体的には、例えば剰余群Hj+1/Hjが巡回群であれば可換群ですから可解群という事にもなります。そのようなタイプの群は、ベキ根で解ける多項方程式のガロア群を論じる時に出てきたりします。
⑤剰余群G/Nが可換群 ⇔ NがD(G)を含む事
【これは交換子群一般について言えます。性質として特に可解群に関係が深いです。】
5番目の性質については、まずG/Nの元の積を順番を変えて書いてみます。
xとyをGの元として、
(Nx)(Ny)=N(xy) と(Ny)(Nx)=N(yx) の2パターンありますが、
もしN(xy)=N(yx)であるのなら
【※ここでの括弧は分かりすくするためにつけているだけで、Nxy=Nyxと書いても同じ】
y-1x-1を右から乗じる事によって
N(xyy-1x-1)=N(yxy-1x-1) ⇔ N=N(yxy-1x-1)
これが成立するためには、yxy-1x-1がNの元でなければなりませんが、
yxy-1x-1はGの交換子です。
【yxy-1x-1の逆元はxyx-1y-1】
よって、G/Nが可換という事は任意のD(G)の元が例外なくNの元でもある事、
つまりD(G)⊂Nを意味します。
逆にD(G)⊂Nならば
N=N(yxy-1x-1) ⇔ N(xyy-1x-1)=N(yxy-1x-1) のように逆にたどって、
右側からxyを乗じればN(xy)=N(yx)となり、剰余群G/Nは可換である事になります。
⑥交換子群列の隣り合う交換子群の剰余群は可換
6番目の性質については、交換子群列において例えばD2(G)⊃D3(G)のような包含関係があり、
しかもそれらは群と正規部分群の関係にあって\(D_2(G)\triangleright D_3(G)\) のようになっています。
そこで剰余群D2(G)/D3(G)の可換性を調べてみると、
D3(G)とは「D2(G)の交換子群」なのでD3(G)=D(D2(G)) とも書けます。
集合が(群も含めて)等号で結ばれるという事は
「D3(G)⊃D(D2(G))かつD3(G)⊂D(D2(G))」という事ですから、
【上述の5番目の性質により】D3(G)⊃D(D2(G)) ⇔「D2(G)/D3(G) は可換である」事になります。
同じように任意の自然数jとj+1の交換子群についても
Dj(G)=D(Dj+1(G)) ⇒ Dj(G)⊃D(Dj+1(G))
⇔「Dj(G)/Dj+1(G) は可換である」という事が言えます。
可解群の場合、最後{e}になっている部分についても同様に
{e}=D(Dk-1(G)) からDk-1(G)/{e}=Dk-1(G) が可換であるという事が言えます。
【{e}=D(Dk-1(G))という事自体から、
交換子群の性質によりDk-1(G)の任意の要素は可換であるとも言えます。】
あるいは、交換子群の性質により「G/D(G)は可換である」と言えるので、
これをDj(G)/Dj+1(G)にも適用して示す事もできます。本質的に同じ証明です。
⑦2つの定義は同等である事
最後に7番目の性質として、2つの定義が同等である事を示します。
まず、交換子群列のほうの定義の場合での性質からDj+1(G)はDj(G)の正規部分群であり、
剰余群Dj(G)/Dj+1(G)は可換であると言えるわけですから、
そのような部分群の列が存在するので
「交換子群列の定義 ⇒ 正規部分群と剰余群の可換性のみの定義」が言えます。
次に逆の場合です。$$G=H_0\triangleright H_1 \triangleright H_2\triangleright H_3\triangleright \cdots\triangleright H_{n-1} \triangleright H_n={e}$$の関係のもとで剰余群Hj-1/Hjが可換であったとします。
この時には「G/Nが可換群 ⇔ D(G)⊂N」【上記5番目の性質】である事を思い出すと、
「G/H1が可換」なのでD(G)=D1(G)⊂H1という事が言えます。
この時D(D1(G))⊂D(H1) ⇔ D(H1)⊃D2(G)でもあります。
【A⊂B ⇒ D(A)⊂D(B) 】
同様に「H1/H2が可換」なのでD(H1)⊂H2であり、先ほどのD(H1)⊃D2(G)と合わせると
H2⊃D(H1)⊃D2(G)が成立します。
以下、同様にH3⊃D3(G)、H4⊃D4(G)、H5⊃D5(G)、Hj⊃Dj(G)・・・・と続きます。
最後の部分でDn(G)⊂Hn={e}となりますが、これはDn(G)={e}を意味します。
よって、交換子群列の中で{e}となる交換子群が存在するので
「正規部分群と剰余群の可換性のみの定義 ⇒ 交換子群列の定義」が言えます。
よって、2つの定義は必要十分条件で結ばれるので同等な定義である事になります。